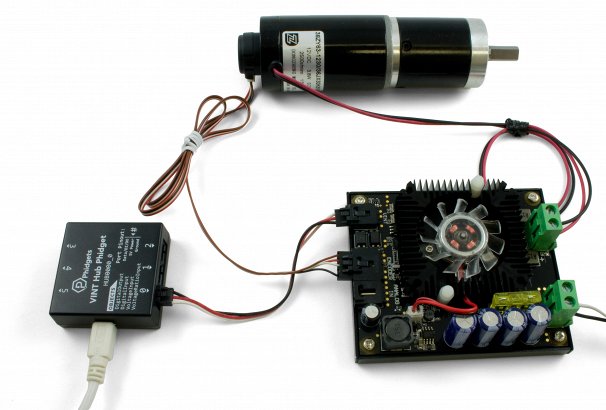
This DC Motor Phidget attaches to your VINT hub and controls the direction and voltage of one DC motor using high frequency pulse-width modulation to achieve smooth operation. It also has current control, allowing you to set a current limit, which puts a maximum on the amount of torque exterted by the motor and allows you to use larger power supplies than what the motor is normally rated for.
Quadrature Encoder Input
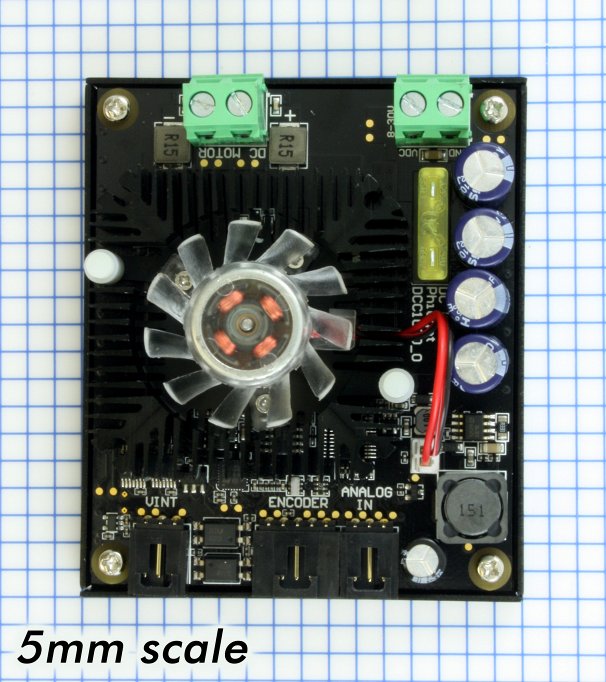
This controller comes equipped with an encoder input that can read in the quadrature signal from an encoder attached to the shaft of your motor. You can use this information to make a closed-loop position controller.
VoltageRatio Input
Similar to a VINT port opened in VoltageRatioInput mode, this port will read in a ratiometric sensor. This is useful for motors that come with attached potentiometers like a DC Linear actuator, so you can incorporate position feedback without needing to buy another input board.
High Compatibility
Many variations of brushed DC motors exist: permanent magnet motors, electromagnet motors, coreless motors, and linear motors. The DC Motor Controller can be used with any of these, as well as other devices that use pulse-width modulation such as small solenoids, incandescent light bulbs, and the hydraulics of pneumatic devices like small pumps and valves.
Motor Current Sensing
This Phidget also lets you monitor how much current is going through your motor coils at any given time. You can use this feature to determine how much physical resistance the motor is working against; the larger the load, the greater the current the motor will draw.
Reliability and Protection
The VINT port on this device is isolated, greatly improving reliability and eliminating ground loops.
The power terminals on this device are polarity protected: if you happen to hook up the power supply backwards, the device simply won't power up and won't be damaged.
There is a fuse included on-board to protect the controller in an over-current event. Board temperature and motor current can be monitored for cooling control and power management. This board has no power-saving features built in; if you want to control power consumption, you'll need to switch the power supply using a relay. The attached fan can be configured and automatically or manually controlled through the API.
|